Как работает модель?
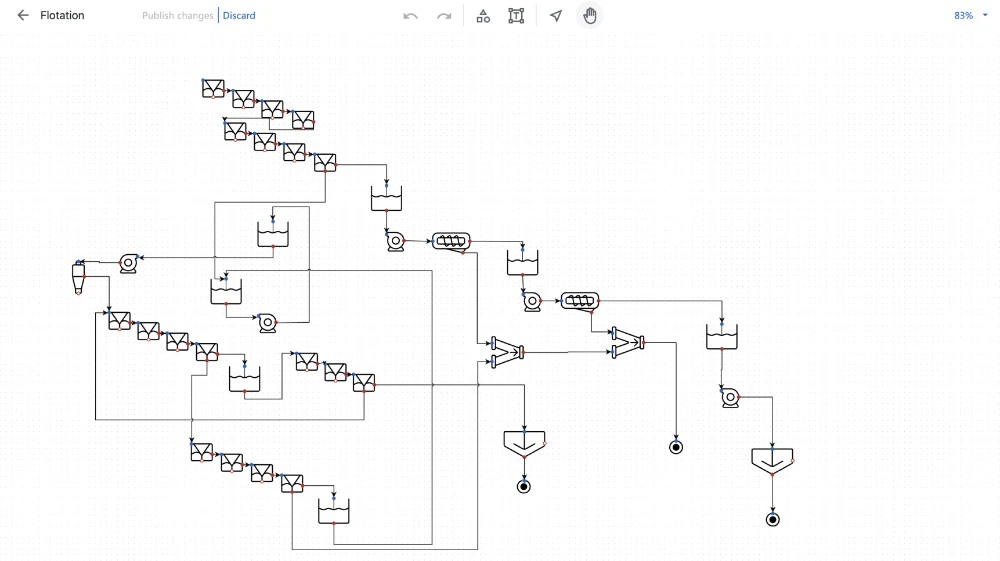
Управление работает на сочетании нейросетевых методов ИИ и нечеткой логики. Это позволяет гибко менять набор используемых датчиков и управлений. На основании прогнозов содержаний и потоков всей секции подбираются оптимальные управляющие воздействия по всем флотомашинам с учетом их связей. Управления максимизируют извлечение, обеспечивая одновременно качество не ниже задания.
